


ROS-Mobile app
free ROS-Mobile app
download ROS-Mobile app
ROS-Mobile apk
free ROS-Mobile apk
download ROS-Mobile apk

ROS-Mobile
4.3


5K+










これについて app
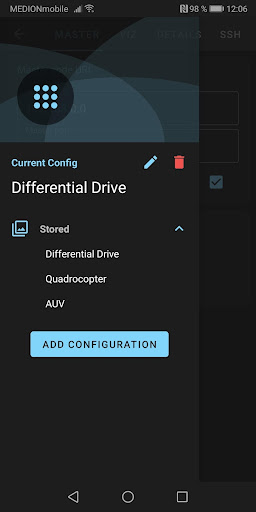
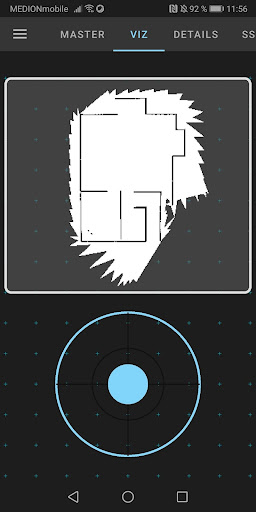
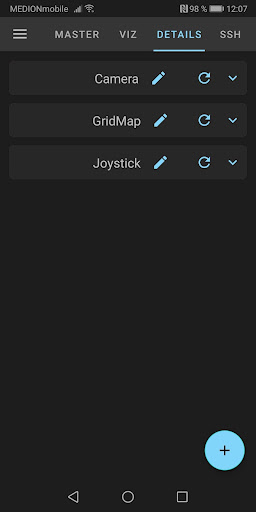
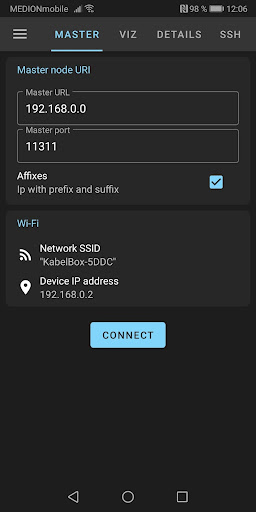
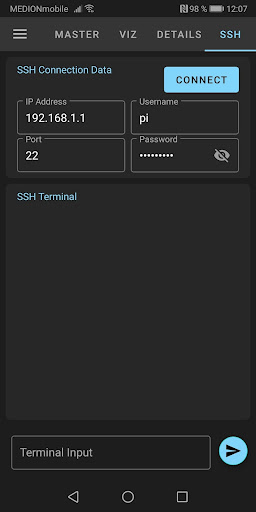
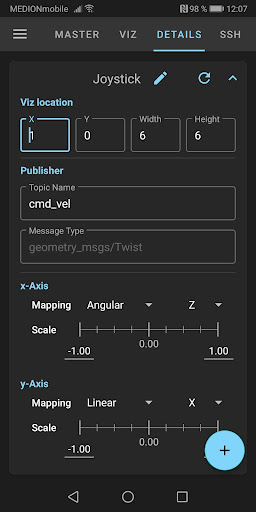
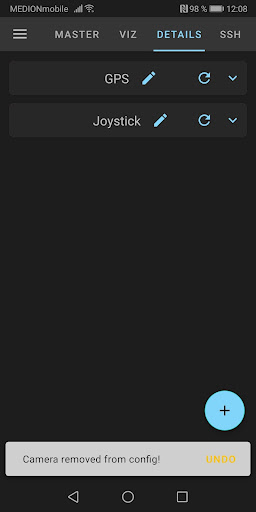
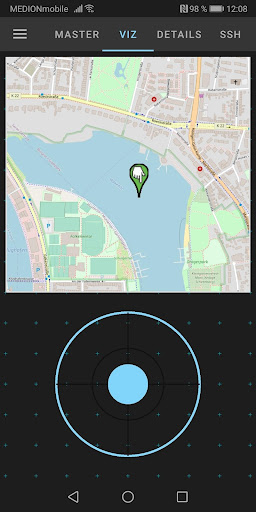
ROS-Mobileは、Robot Operating System(ROS)によって操作されるモバイルロボットシステムの動的制御と視覚化のために設計されたAndroidアプリケーションです。アプリケーションは、標準のROSメッセージでパブリッシャーとサブスクライバーを初期化するROSノードを使用します。全体的なコードアーキテクチャパターンはModelView ViewModel(MVVM)であり、アプリケーションを安定させ、高度にカスタマイズ可能にします。
研究にROS-Mobileを使用している場合は、引用してください
@article {rottmann2020ros、
title = {ROS-Mobile:ロボットオペレーティングシステム用のAndroidアプリケーション}、
著者= {ロットマン、ニルスとスタッド、ニコとエルンスト、フロリスとリュッカート、エルマー}、
journal = {arXiv preprint arXiv:2011.02781}、
年= {2020}
}
詳細については、GitHubページをご覧ください(ROS-Mobileを検索してください)。
スクリーンショット
コメント
[email protected] をコピーします。全著作権所有
Google Play™ は Google Inc. の商標です。
ApkYes は、Google、Android OEM、Android アプリケーション開発者とはいかなる形でも提携していません。

